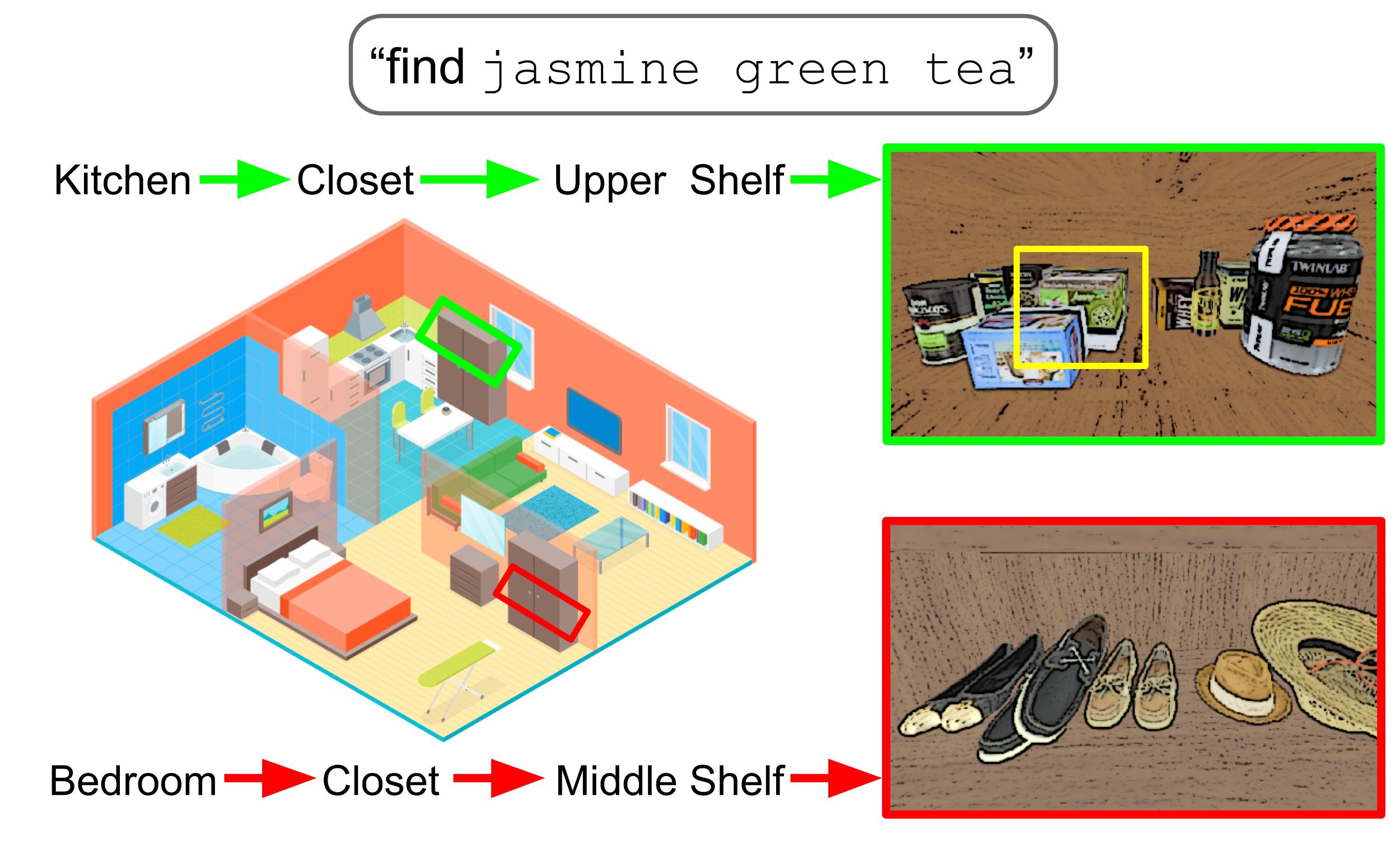
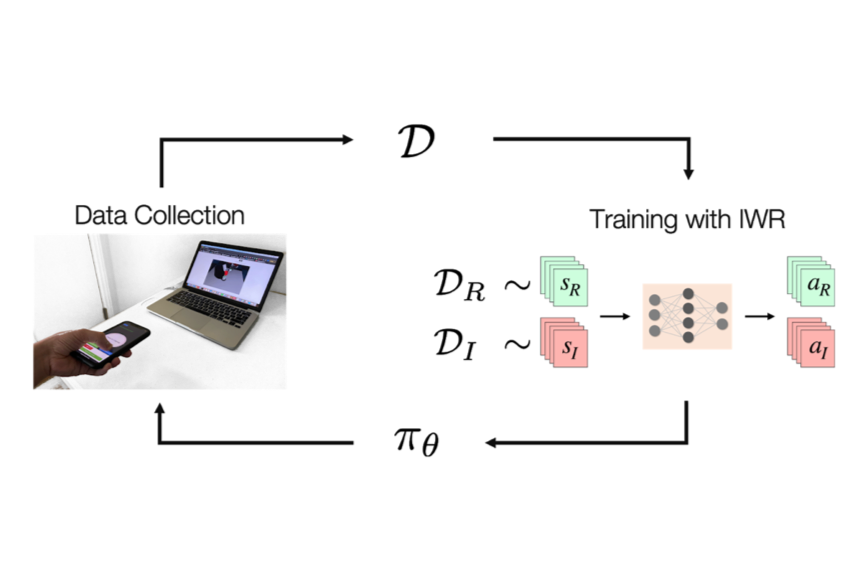
Learning Language-Conditioned Robot Behavior from Offline Data and Crowd-Sourced Annotation
Conference on Robot Learning. November 2021

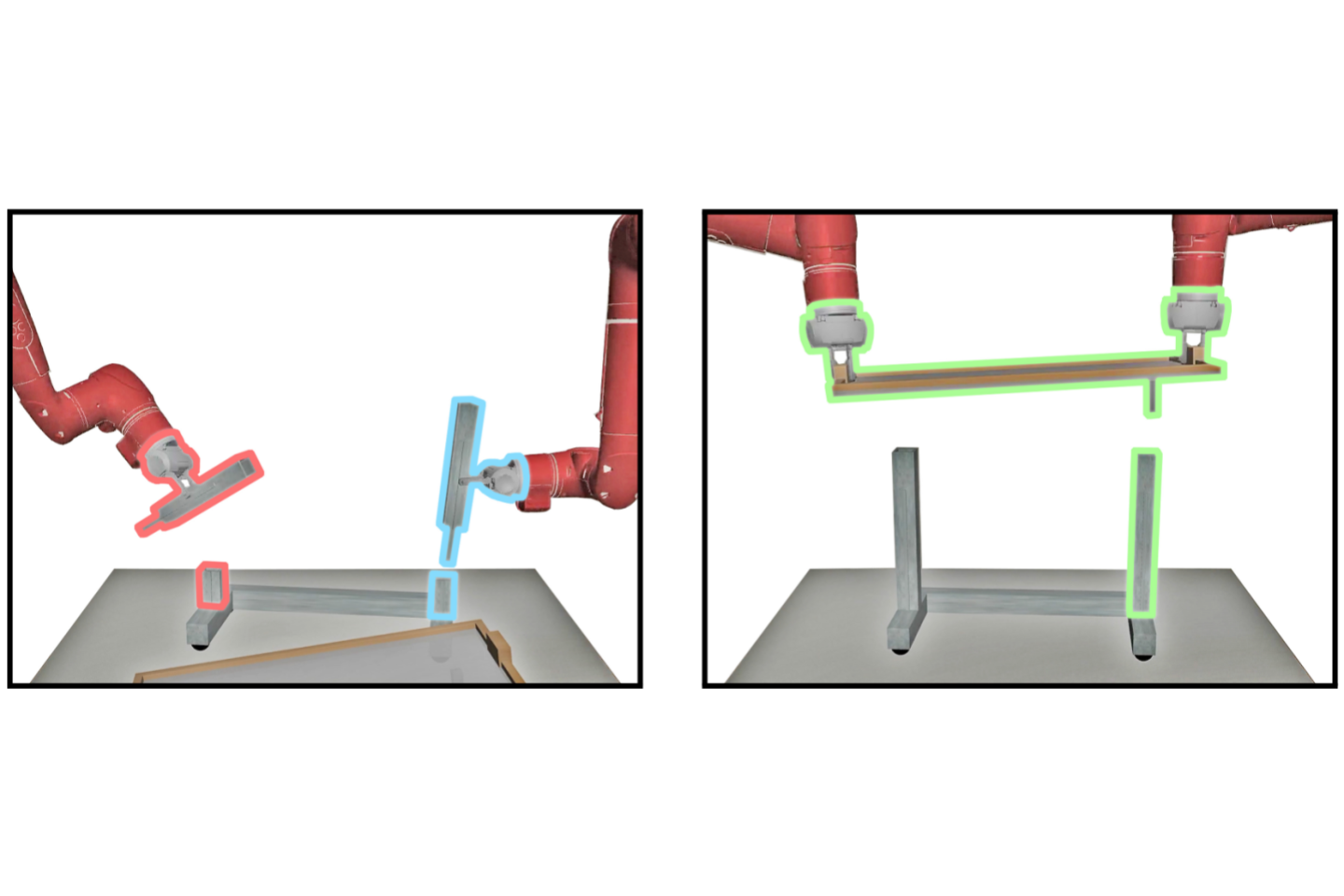
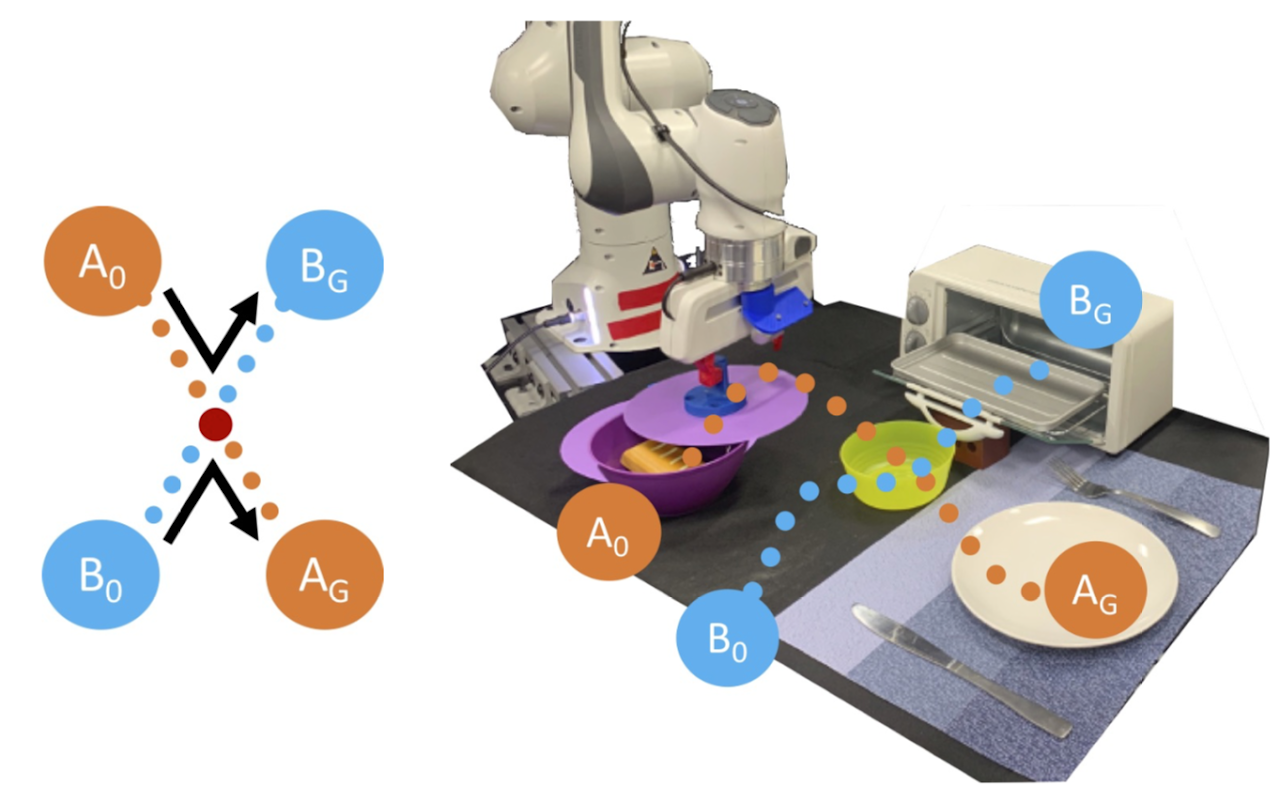
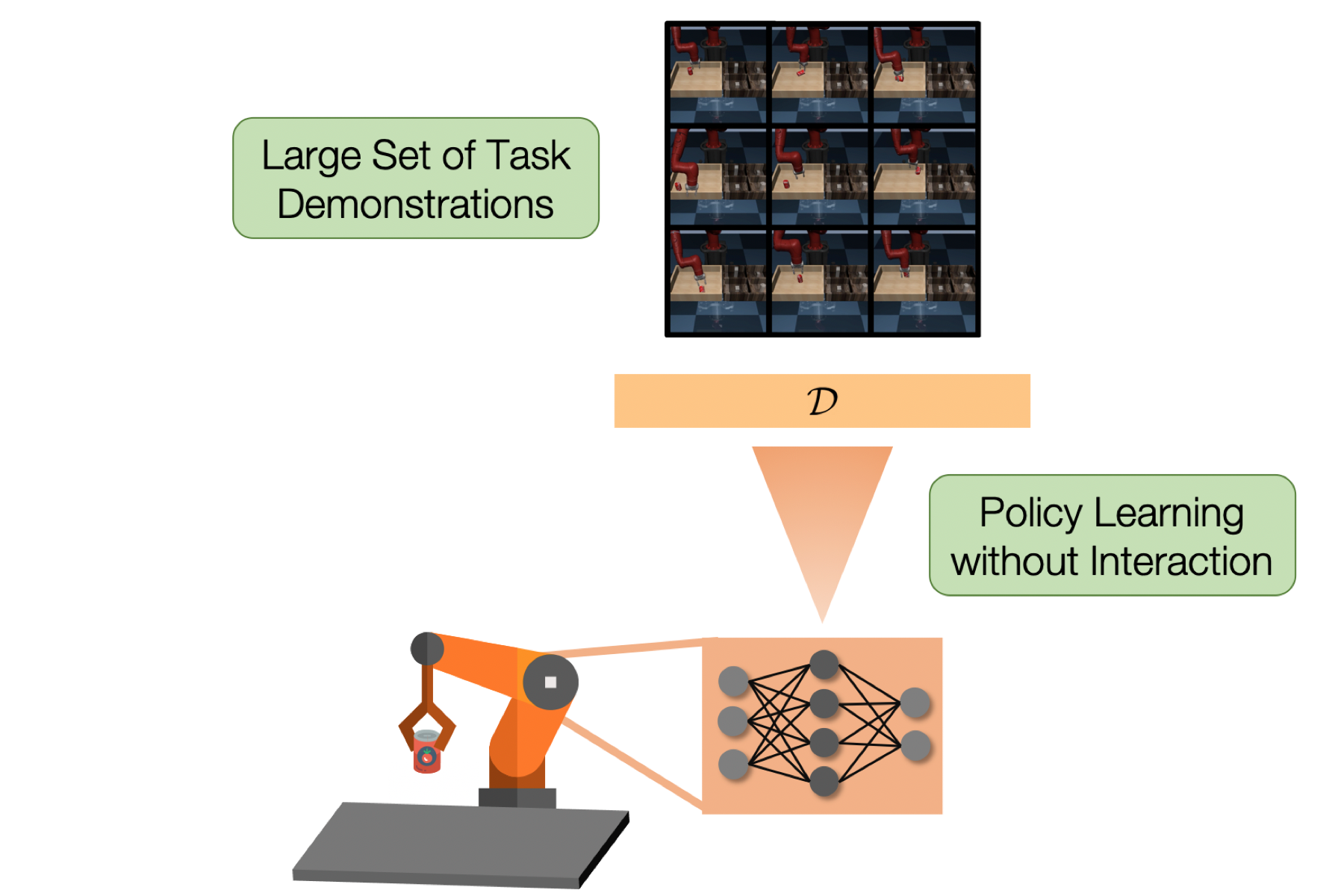
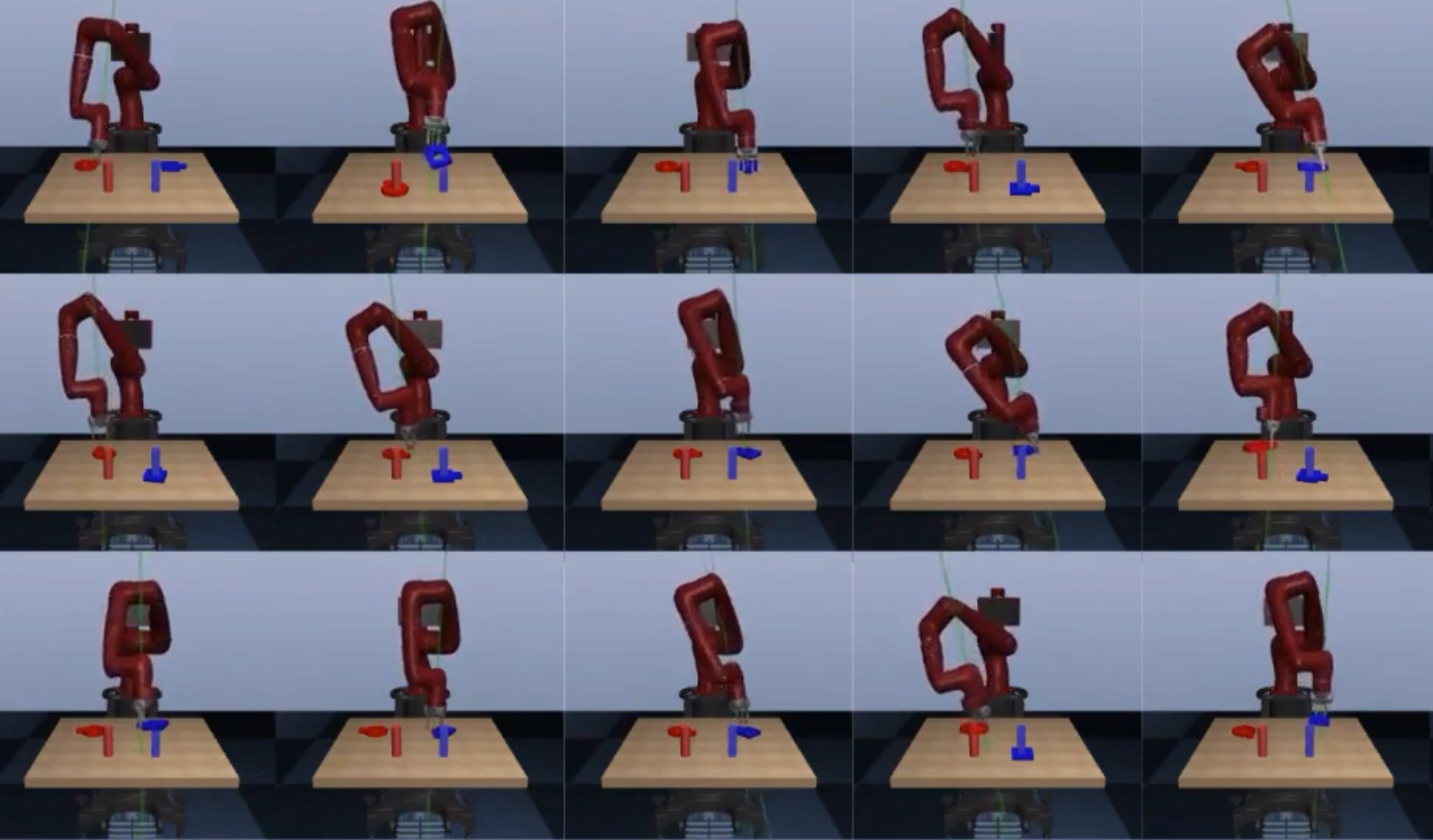
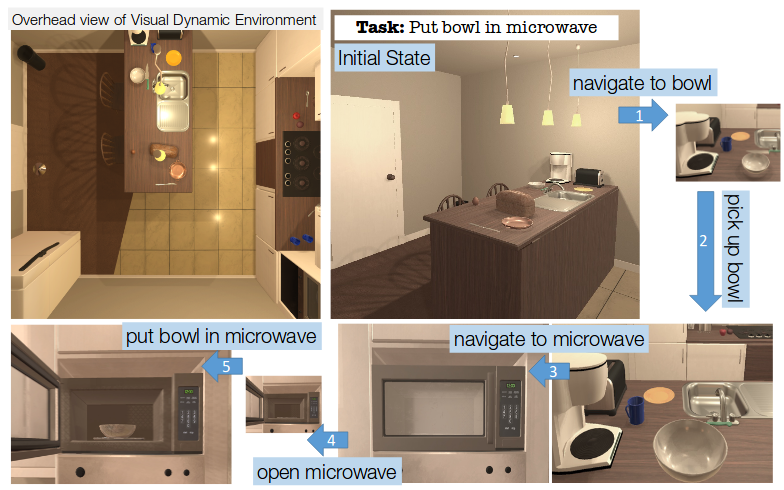
Example-driven model-based reinforcement learning for solving long-horizon visuomotor tasks
Conference on Robot Learning. November 2021


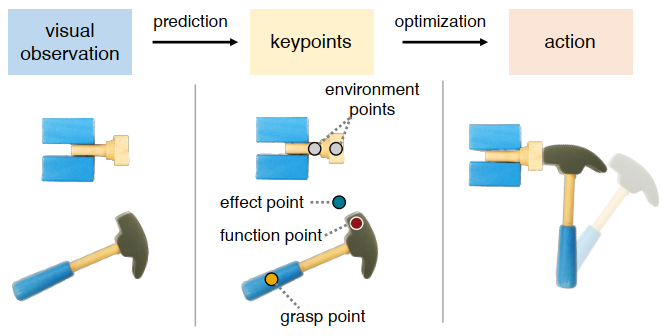

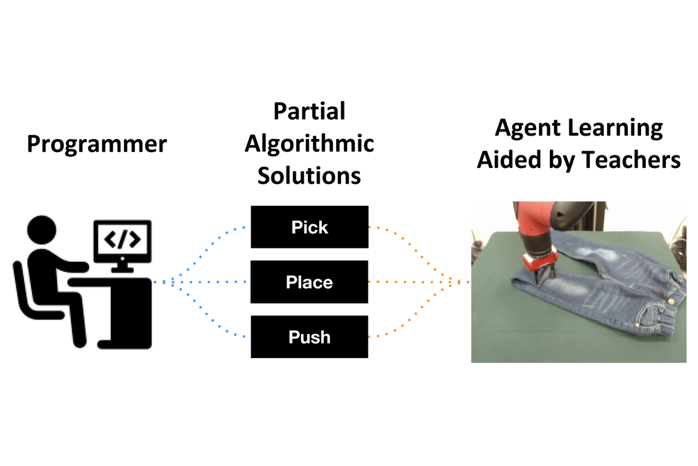
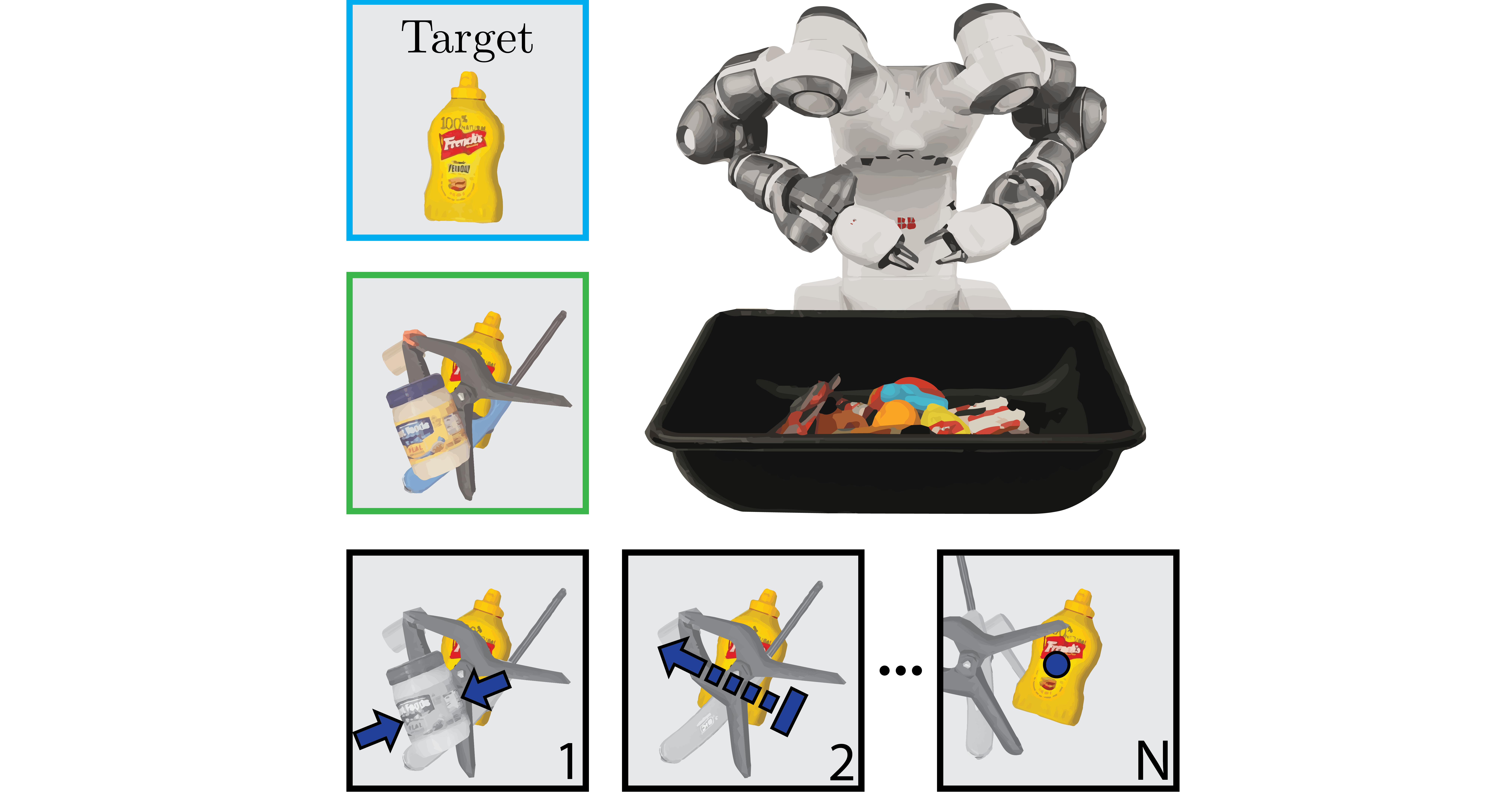
Motion Reasoning for Goal-Based Imitation Learning
IEEE International Conference on Robotics and Automation (ICRA). May 2020

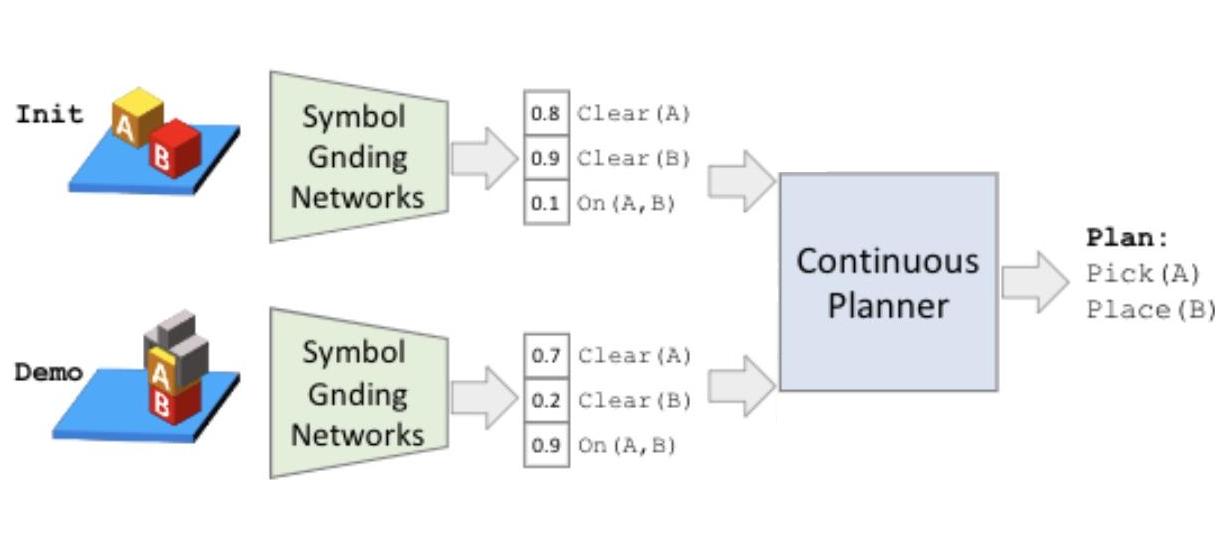
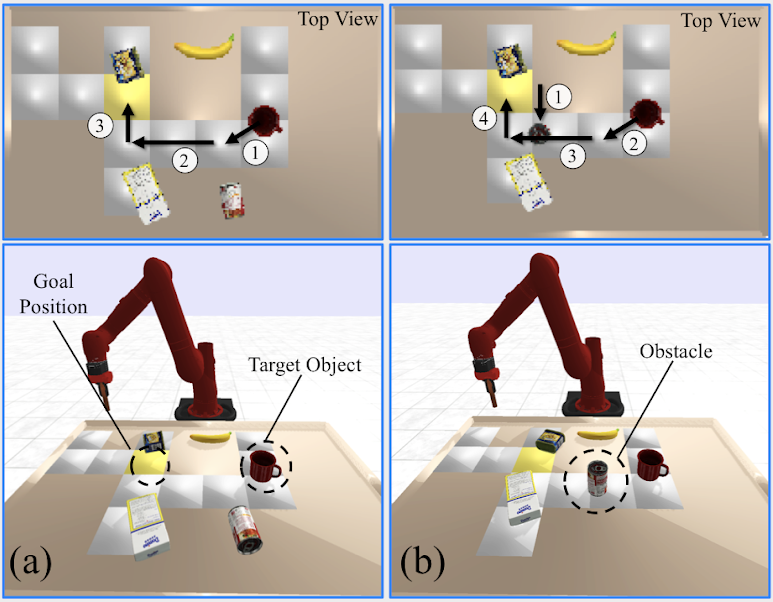
Continuous Relaxation of Symbolic Planner for One-Shot Imitation Learning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). November 2019
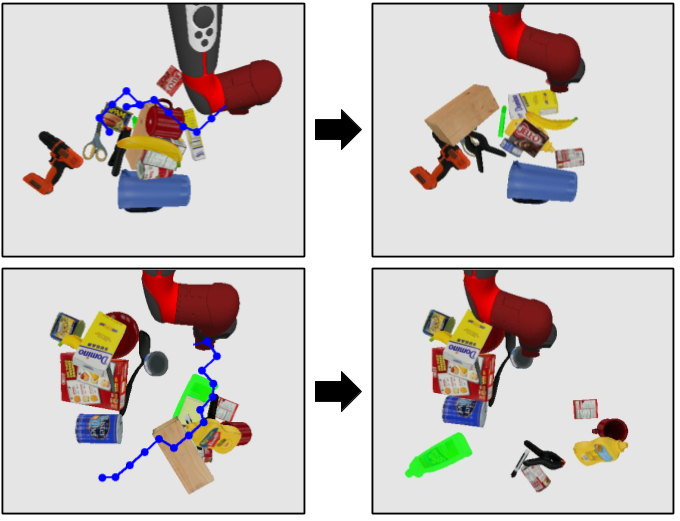
Dynamics Learning with Cascaded Variational Inference for Multi-Step Manipulation
Conference on Robot Learning (CoRL). October 2019
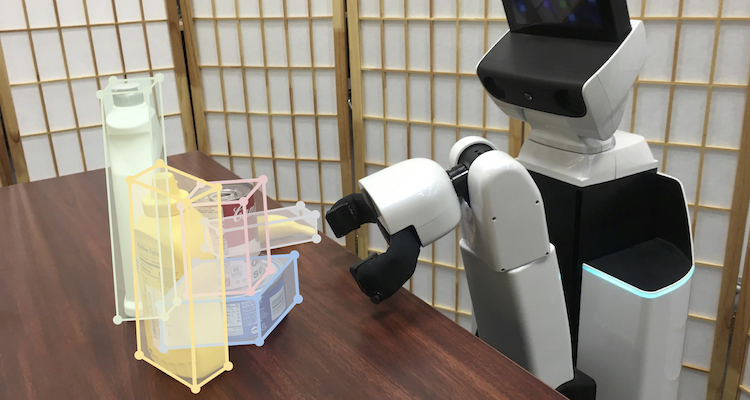
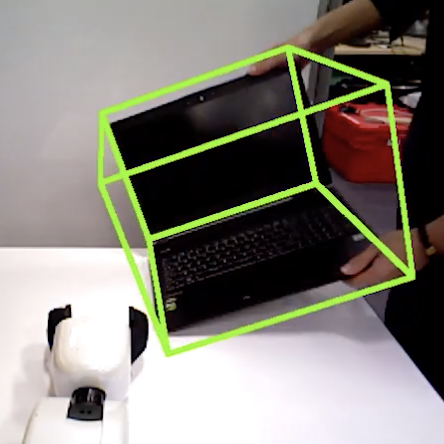
DenseFusion: 6D Object Pose Estimation by Iterative Dense Fusion
IEEE Conference on Computer Vision and Pattern Recognition (CVPR). June 2019
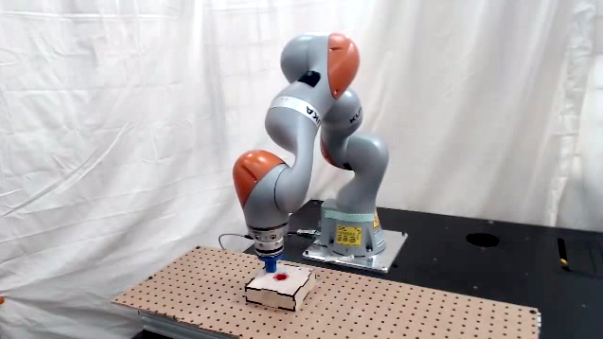

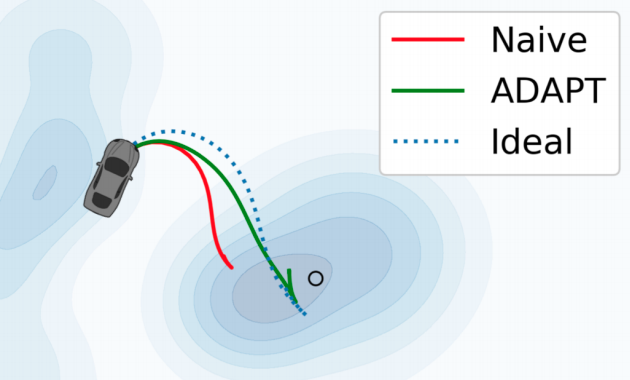
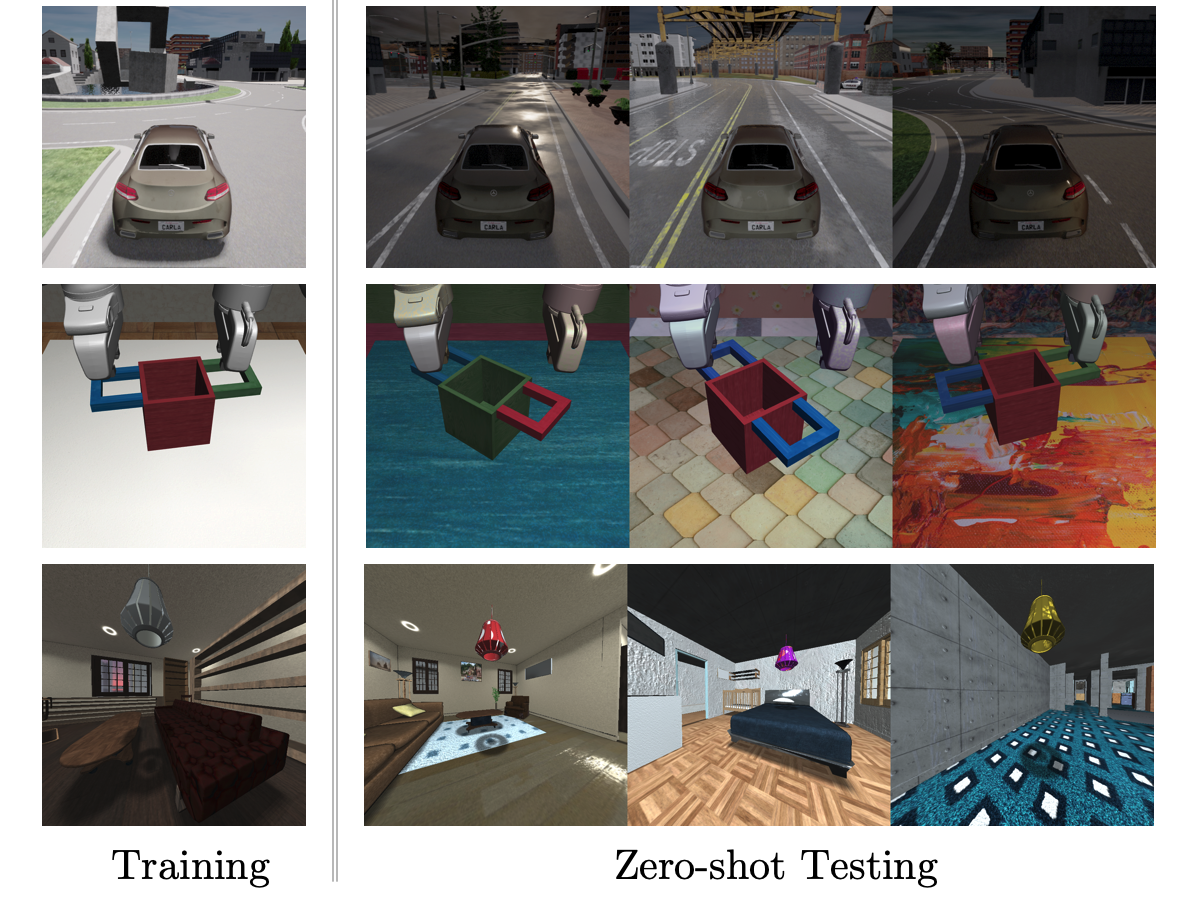
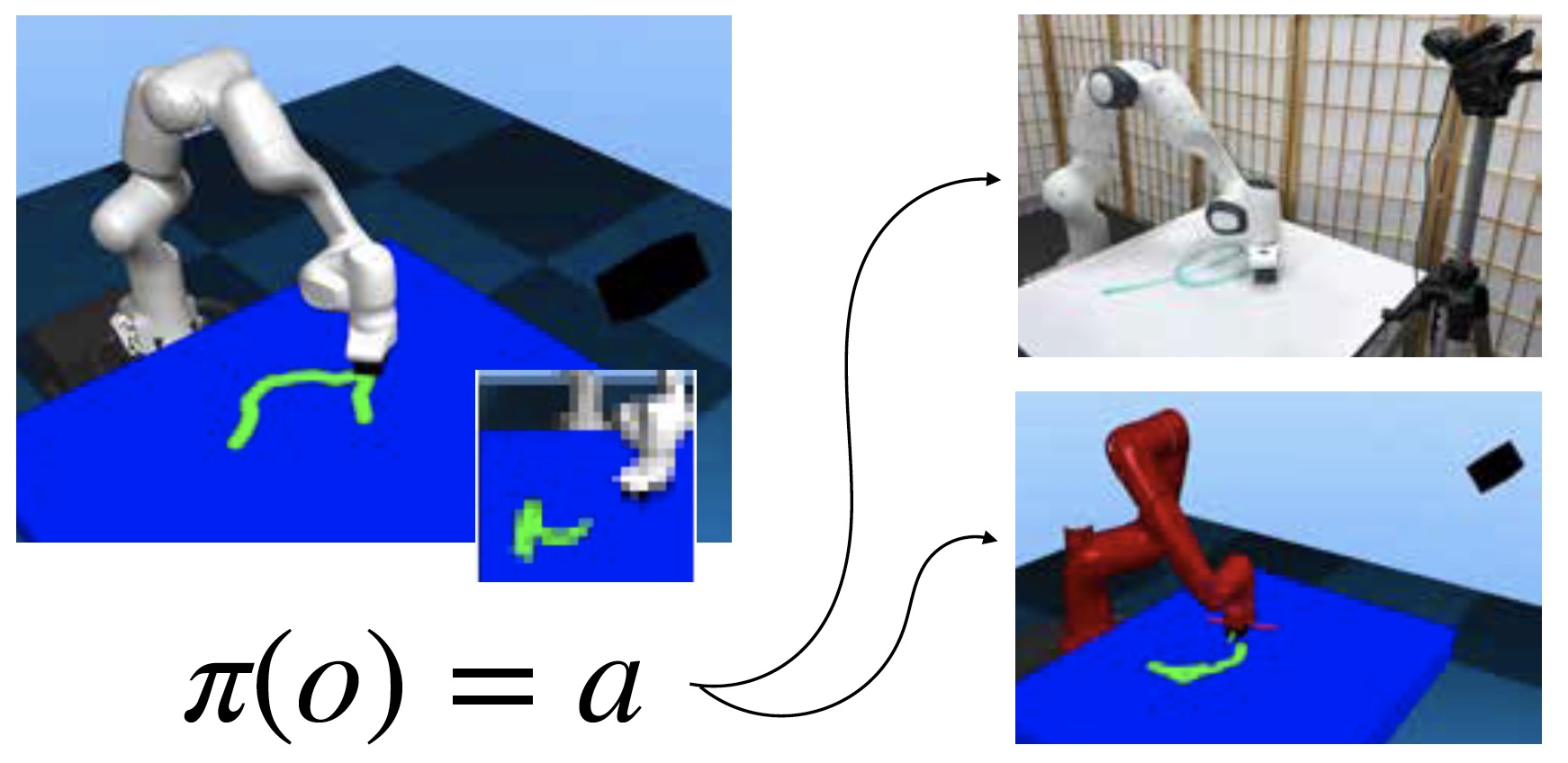
AdaPT: Zero-Shot Adaptive Policy Transfer for Stochastic Dynamical Systems
International Symposium on Robotics Research (ISRR). December 2017
We acknowledge Stanford PAC for the website template.
©Stanford University, Stanford, California 94305.
Copyright Complaints.