Dynamics Learning with Cascaded Variational
Inference for Multi-Step Manipulation
 Kuan Fang
Kuan Fang
 Yuke Zhu
Yuke Zhu
 Animesh Garg
Animesh Garg
 Silvio Savarese
Silvio Savarese
 Fei-Fei Li
Fei-Fei Li
Abstract
The fundamental challenge of planning for multi-step manipulation is to find effective and plausible action sequences that lead to the task goal. We present Cascaded Variational Inference (CAVIN) Planner, a model-based method that hierarchically generates plans by sampling from latent spaces. To facilitate planning over long time horizons, our method learns latent representations that decouple the prediction of high-level effects from the generation of low-level motions through cascaded variational inference. This enables us to model dynamics at two different levels of temporal resolutions for hierarchical planning. We evaluate our approach in three multi-step robotic manipulation tasks in cluttered tabletop environments given high-dimensional observations. Empirical results demonstrate that the proposed method outperforms state-of-the-art model-based methods by strategically interacting with multiple objects. [PDF]
[PDF]
Tasks

Execution
We observe that the robot comes up with diverse strategies in different task scenarios.Open Path: When the target object is surrounded by obstacle objects, the robot opens a path for the target object towards the goal without entering the restricted area (red tiles).
Get Around: In presence of a pile of obstacle objects between the target and the goal, the robot pushes the target around.
Squeeze Through: When there is a small gap between a bunch of objects, the robot squeezes the target object through the gap.
Move Away Obstacles: When pushing the target object across the bridge (grey tiles), the robot clears obstacle objects one by one along the way.
Push Target Through Obstacles: When the robot cannot directly reach the target object, it squeezes the target object by pushing obstacle objects.
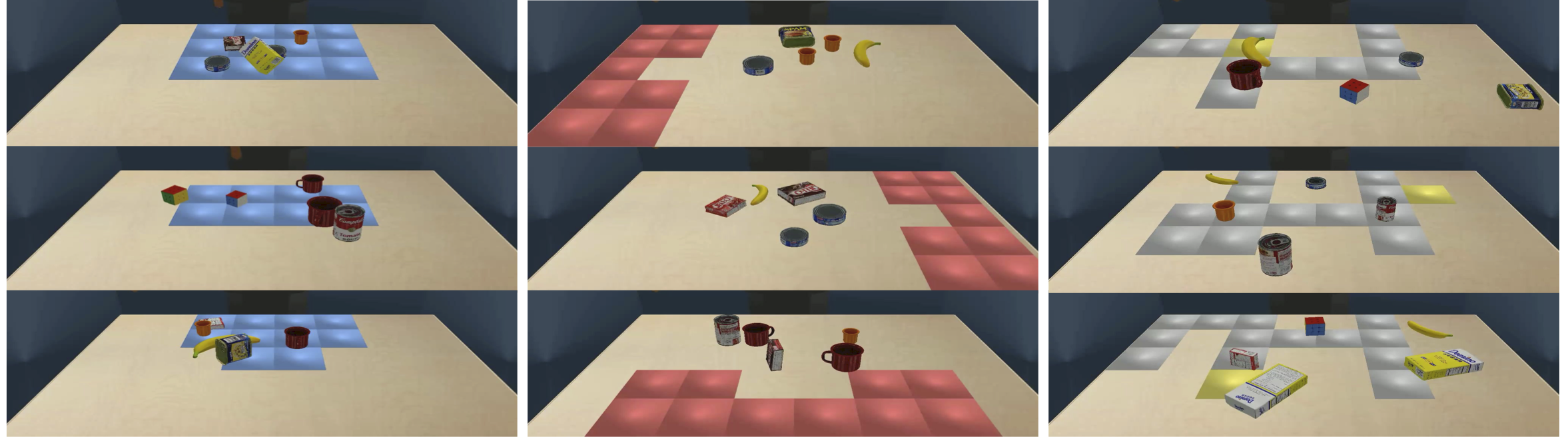
Clean up a workspace: Clean up a workspace: The robot moves objects out of a designated workspace (blue tiles).
Variations
Various layouts and objects for in each task in simulation and the real world.